
Après avoir débuté un micro-hélicoptère (WLtoys V977), puis progressé avec un hélicoptère Ready-To-Fly (Blade 230s), j’ai monté il y a quelques mois mon premier hélicoptère en kit. J’ai du faire beaucoup de recherche sur Internet pour faire le choix des composants, réaliser le montage et le réglage mécanique dans les règles de l’art puis enfin la configuration logicielle. Je vais tenter de regrouper dans cet article toutes les connaissances accumulées.
Les outils nécessaires
Il vous faudra :
- Un set de tournevis hexagonaux (clés Allen)
- Du frein filet (la Loctite 243 était recommandé dans mon kit)
- De la graisse (mon choix s’est porté sur Dry Fluids)
- Un incidence-mètre numérique (RC Logger Digital Pitch Gauge)
- (Parfois) Un fer à souder pour les connecteurs
- (Parfois) Une Dremel ou au minimum une petite lime : j’en ai eu besoin pour faire un aplat sur l’axe du moteur
- Un ordinateur pour la configuration logicielle du module Flybarless
Le choix du kit
Il existe de nombreux fabricants d’hélicoptères radio-commandés en kit (Align, SAB, MSH, Mikado, Synergy…). Certains fabricants proposent des “combos” plus ou moins complet (kit, moteur, servos, …) pour faciliter le choix des composants compatibles. C’est sûrement le choix le plus facile si vous ne voulez pas passer des heures sur les forums.
Sinon, lisez-bien la notice de montage sur le site du fabricant pour choisir correctement l’équipement électronique compatible (taille des servos, du moteur…) et consultez les “build threads"sur Helifreak . Ils regorgent de retours d’expérience sur les différentes configurations possibles.
Après avoir hésité entre plusieurs modèles, mon choix s’est porté sur le Protos 380 du fabricant italien MSH. C’est un hélicoptère polyvalent qui s’accommode de vitesses de rotor faibles ou très élevées selon les styles de pilotage. La qualité de fabrication est excellente et le système d’entraînement à double-courroie est silencieux et fiable.

Le choix de l’électronique
En plus du kit, il vous faudra :
- Un moteur
- Un contrôleur
- Un module Flybarless
- Un récepteur adapté à votre radio (Spektrum, Futaba, Jeti…)
- Trois servos pour le cyclique et un servo pour l’anticouple
- Les pales principales et d’anticouple si elles ne sont pas fournies dans le kit
- Une ou plusieurs batteries
- Des connecteurs EC3 ou XT60 : une prise mâle (côté contrôleur) et une prise femelle (côté batterie)
Pour le Protos 380, mon choix s’est porté sur les composants suivants :
- Kit MSH41506 incluant un Protos 380 et un module Flybarless Mini Brain v2
- Moteur X-NOVA 2820 890KV XTS
- Contrôleur Hobbywing Platinum Pro 60A-LV V4
- Combo servos MKS HV93*3 +HV93i*1
- Pales Switchblades 383mm
- Batterie KDLIPO KD1800-35C-6S
- Connecteurs EC3
Le moteur

Xnova 2820-890kv
Concernant le moteur, le point important est le nombre de KV. C’est le nombre de tours/minute par volt à vide. Un moteur de 890KV alimenté par une tension de 22.2V tournera à 890 * 22.2 = 19758 tours par minute. Il est important de choisir la bonne combinaison moteur - pignon afin d’obtenir la vitesse de rotation du rotor souhaitée. Il existe des calculateurs en ligne (par exemple celui-ci ou celui-là). J’aime bien l’application Android RC-Heli-Gear-Ratio pour son côté graphique.
Le Protos 380 est équipé d’une couronne principale de 120 dents et il est livré avec un pignon moteur de 21 dents. Ci-dessous on voit qu’avec des gaz à 82% (c’est à dire une tension à 18.2V pour une batterie LiPo 6S), le rotor principal tournera à une vitesse proche de 2800 tours/minute. MSH propose toute une gamme de pignons de 14 à 25 dents pour obtenir des vitesses différentes ou s’adapter à des moteurs de KV différents.

Capture d’écran de RC-Heli-Gear-Ratio
Si vous souhaitez obtenir une vitesse du rotor plus basse, il faut jouer sur le pignon (moins de dents) plutôt que sur les gaz. Si vous volez avec les gaz bas (c’est à dire moins de tension en sortie de l’ESC), cela met un stress sur l’ESC qui va se mettre à chauffer et vous allez perdre de l’énergie en chaleur. Pour prendre une analogie avec une voiture, c’est un peu comme rouler à 30 km/h en 5ème : vous allez faire souffrir votre moteur. La plage idéal de gaz est entre 80-90%. On en reparle plus bas lors du réglage du régulateur de vitesse.
Le contrôleur

Hobbywing Platinum 60A V4
Le contrôleur ou ESC (Electronic Speed Controller) est un circuit électronique qui contrôle et régule le moteur électrique. Il est important de choisir un contrôleur adapté à la puissance du moteur. Les spécifications du Xnova 2820-890KV XTS indiquent une puissance (P) de 1080 Watts en continu et 1360 Watts en crête. Il est alimenté avec une batterie LiPo 6S de 22.2V, cela donne une intensité I = P / U = 1080 / 22.2 = 48 ampères en continu (et 1360 / 22.2 = 61 A en crête). Le contrôleur Hobbywing Platinum Pro 60A est donné pour 60 ampères en continu et 80A en crête, donc il tiendra largement la charge.
Les servos

Les servos existent en plusieurs tailles (sub-micro, micro, mini, standard). La notice de l’hélicoptère précise la taille nécessaire. Pour le Protos 380, il faut des servos micros au cyclique et un servo micro ou mini pour l’anticouple. Il est important de ne pas mélanger les modèles de servos au cyclique. Pour l’anticouple, ce n’est pas gênant d’avoir une marque ou un modèle différent. Néanmoins, le plus simple est de prendre un combo chez un fabricant. J’ai choisi le combo MKS HV93*3 pour le cyclique et HV93i pour l’anticouple.
Les servos les plus récents et les plus performants sont des servos HV pour “High Voltage”, c’est-à-dire qu’ils sont capables d’opérer jusqu’à 8.2V au lieu de 4 à 5V pour les servos standards. Il faut bien vérifier que l’ESC choisi soit capable de délivrer une alimentation en 8.2V pour les servos, ce qui est le cas de l’Hobbywing Platinum 60A V4.
Installation du logiciel
Téléchargez le logiciel de configuration du Brain v2 depuis le site de MSH Europe. Je vous recommande de le lancer en “mode démo” (sans module connecté) pour vous familiariser avec l’interface. Par défaut, l’application démarre sur l’assistant de configuration (“Wizard Menu”) qui permet de configurer le module en 14 étapes :
- Sélection des composants
- Configuration des servos
- Sélection du récepteur
- Connexions
- Configuration émetteur
- Sélection du plateau cyclique
- Configuration du plateau cyclique
- Configuration anticouple
- Orientation module
- Sélection nombre et taille des pales
- Configuration stabilisation automatique et sauvetage
- Configuration gaz et régulateur de régime
- Configuration style de vol
- Vérifications finales et conseils de réglages
Prenez le temps de parcourir toutes les étapes en mode démo pour bien comprendre les actions à réaliser. Ensuite, il est temps de passer aux choses sérieuses :-)
Un peu de soudure
Si vos connecteurs ne sont pas pré-soudés sur l’ESC, le moteur et la batterie, c’est le moment de les souder. N’étant pas du tout un pro de la soudure, j’ai suivi à la lettre des tutos sur YouTube. En voici quelques uns qui m’ont bien aidé :
Comment souder les connecteurs sur l’ESC
Comment changer des connecteurs sur un moteur
Comment souder des connecteurs EC3
Comment étamer un fil électrique
Assemblage de l’électronique
Une fois les connecteurs soudés, vous pouvez assembler l’ESC, le module Flybarless, les servos et le(s) satellite(s). L’exemple ci-dessous est le schéma de connexion du MSH Mini Brain v2 avec deux satellites Spektrum DSMX.

Schéma de connexion copié de l’étape 4 du logiciel MSH
Note : sur ce schéma, il manque un câble entre l’ESC (prise RPM) et le Brain (prise GOV). Il est indispensable pour utiliser la fonction de régulation de régime (“Governor” en anglais) pilotée par le Brain.
Connectez le Brain à votre PC et lancez le logiciel MSH. A l’étape 3, vous pouvez associer votre radio avec le ou les satellites. Je ne détaille pas dans cet article comment régler la radio, suivez bien les instructions du logiciel MSH à l’étape 5 (plateau cyclique standard H1 à 90°, les exponentielles doivent être désactivées, la courbe de pas collectif de -100 à +100 avec le 0 au milieu, etc…). En fait, la configuration de la radio est assez basique et tout se fait depuis le module FBL.
Pensez à étiquetez les servos (SRV-1, SRV-2, SRV-3, TAIL), ce sera plus facile pour les repérer lors de l’assemblage.
Assemblage du kit
Vous pouvez commencer ensuite l’assemblage du kit. La notice du Protos 380 est bien faite, mais malgré cela, j’ai beaucoup apprécié cette vidéo en time-lapse qui montre la construction du début à la fin :
Cette vidéo pas-à-pas m’a été très utile pour le montage du Protos 380
Globalement, l’assemblage ne pose pas de difficulté particulière, sauf en ce qui concerne le moteur Xnova 2820. La position de l’aplat sur l’axe est tout en haut alors qu’il doit être situé plus bas pour être parfaitement en face de la vis de serrage du pignon moteur.
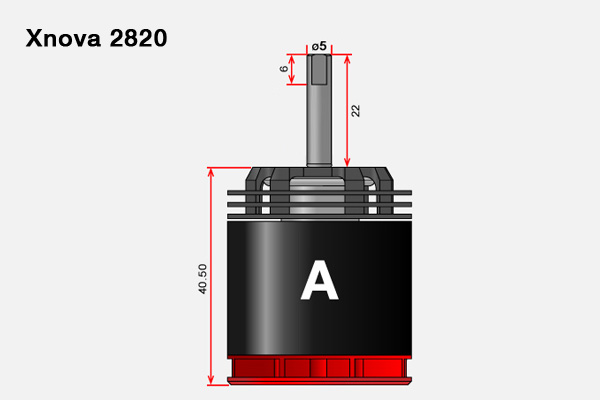
Aplat en haut de l’axe sur le Xnova 2820

J’ai suivi ce tuto sur YouTube pour faire un aplat avec une Dremel. Le point le plus important est d’emballer le moteur dans un sac plastique pour empêcher la limaille de fer d’être attirée par les puissants aimants à l’intérieur du moteur.
Comment faire un aplat sur l’axe moteur avec une Dremel
Et en photos :

On transperce le plastique avec l’axe du moteur

On scotche bien autour de l’axe

Un peu de Dremel sur l’endroit repéré

Et voilà !
Réglages mécaniques
POUR VOTRE SÉCURITÉ, SUIVEZ BIEN LES INSTRUCTIONS DU LOGICIEL MSH. Par exemple, à certaines étapes, il faut activer l’auto-rotation et/ou la coupure moteur, débranchez les câbles du moteur et/ou désengager le pignon moteur, etc…
Une fois le kit assemblé avec son électronique, reprenez la configuration dans le logiciel MSH à partir de l’étape 6 (Sélection du plateau cyclique).
Les réglages de l’étape 7 sont très importants pour avoir un plateau cyclique parfaitement horizontal. Si vous avez parfaitement respecté la longueur de chaque tringle indiquée dans la notice (en vissant plus ou moins les chapes à rotule), le plateau cyclique devrait être quasiment horizontal. Il ne devrait rester que des micro ajustements à faire sur l’étape 7.

C’est également à l’étape 7 que vous allez définir l’inclinaison maximale des pâles (“pitch”). Comme je souhaite faire du vol 3D, j’ai opté pour un réglage de +/- 12°, c’est à dire un pas positif de +12° et un pas négatif de -12°. C’est là qu’intervient l’incidence-mètre numérique pour faire ce réglage précisément. Le plus simple est de regarder le fonctionnement de l’incidence-mètre en vidéo :
Régulateur de régime (Governor)
Le régulateur de régime permet de maintenir la vitesse du rotor constante quelle que soit la charge du moteur. Cela permet d’avoir les mêmes sensations de pilotage du début à la fin du vol (alors que la tension de la batterie diminue). En vol 3D, c’est particulièrement utile afin d’obtenir une réaction du cyclique constante quelle que soit l’intensité de la manœuvre.
Vous pouvez choisir d’utiliser le régulateur intégré de l’ESC ou d’utiliser le régulateur du FBL. J’ai lu beaucoup d’avis pour ou contre. Finalement, j’ai opté pour le régulateur du Brain car :
- c’est pratique : tous les réglages se font au même endroit
- il est possible de régler jusqu’à 3 vitesses activables depuis la radio
- en théorie, le FBL dispose de plus d’informations (mouvements des manches), et donc la régulation est plus intelligente, alors que l’ESC fait une régulation a posteriori (c’est-à-dire par exemple qu’il augmente le voltage après avoir constaté une baisse de régime).
Pour configurer l’Hobbywing Platinum Pro v4, il faut utiliser le logiciel Hobbywing USB Link, aller dans l’onglet “General settings”, puis choisir “Helicopter (Linear Throttle)”. Ensuite, tous les réglages se font dans le logiciel MSH à l’étape 12.

Vérifications finales et premier vol
Avant le premier vol, vérifiez que les commandes répondent correctement : incidence des pales, cyclique, anti-couple. Faites attention à l’anti-couple, c’est assez facile de se tromper de sens. Là encore, le logiciel MSH donne tous les conseils utiles à la page 14. Démarrez l’hélicoptère sans les pâles pour vérifier qu’il n’y a pas de vibration ou de bruit suspect.
Si vous avez le moindre doute, cherchez d’où peut venir le problème et demandez de l’aide à un pilote expérimenté. Il existe plusieurs centaines de clubs d’aéro-modélisme en France et il est facile d’en trouver un près de chez soi avec le moteur de recherche de la FFAM.
Bon vol !
Adddendum : immatriculation pour les aéronefs de plus de 800g
En France, la loi Drones n° 2016-1428 a rendu obligatoire depuis le 26 décembre 2018 l’immatriculation des aéronefs civils circulant sans personne à bord dont le poids dépasse les 800 grammes. Vous devez immatriculer vos appareils sur le site AlphaTango et suivre une formation en ligne assortie d’un questionnaire sur le site Fox AlphaTango.
C’est assez risible car le seuil de poids exclut de facto la majorité des drones grands publics ou semi-pro et, de toute façon, les personnes mal intentionnées ne vont pas évidemment pas immatriculer leur drone. C’est malheureusement un exemple de plus de législation qui impose des contraintes à une majorité de pratiquants responsables pour régler des nuisances causées par une infime minorité.
Commentaires
Commentaire par Stefano MAZZONI on 2019-02-18 12:53:16 +0100
Salut Hervé,
ici Stefano_F6BNM du même Club que toi, l’AMCY.
Je pense que tu te souviens de nos échanges autour de ton magnifique PROTOS 380 et ton essai de mon 230S V2 samedi dernier (16/02/19).
Ton post est super intéressant et bien fait. Bravo ! Ca donne envie.
Alain Dupire de Rambouillet (230S V2 aussi) et moi sommes intéressés.
Je me suis fait un petit doc aide-mémoire du coup, et aimerais te le repasser.
J’ai aussi des questions sur marque et type moteur à mettre en place, ceci sans devoir commencer à usiner l’arbre de sortie du bourrin.
Également, j’ai détecté que les pales (rotor pal et rotor AC) n’étaient pas dans le kit… très étonnant. Donc, quel marque et type précis mettre en place ?
Les servos que tu as mis en place ont-ils une mignonnerie métallique ?
Faut-il une box de configuration pour l’ESC ?
En toile de fond, on a comme l’impression que MSH semblerait être en train de l’cher le morceau (le site MSH-USA est « down » et ils ont créé un nouveau site MSH-Electronics, uniquement pour les BRAIN2) qu’est-ce que ça cache ?). Que doit on penser de la pérénité de ce constructeur ?
Amitiés,
Stefano.
Tél 06 79 11 60 09 / 01 30 43 39 01
34, rue Mazière, 78180 MONTIGNY-le-BTX.
Commentaire par Eric geysen on 2019-04-23 15:22:09 +0200
Bonjour,
Article très intéressant!
Serait il possible de voir comment vous avez câblé l’esc sur le Brain?
Je l’ai mis sur la voie 1 (Brain2) et le c’ble orange sur la voie 5.
MAis je n’ai pas les rpm en retour sur la Jeti…
MErci
Eric
Commentaire par hleroy@hleroy.com on 2019-04-23 21:06:48 +0200
Bonjour Eric,
Le c’ble jaune de l’Hobbywing va sur la prise Governor (GOV) du Brain. Le c’ble doit être branchée sur la prise signal. Cela permet au Brain de connaitre les RPM du moteur.
Ensuite, je ne sais pas comment fonctionne la télémétrie entre Brain et Jeti.
Hervé
Commentaire par hleroy@hleroy.com on 2019-04-23 21:21:32 +0200
Bonjour Stefano,
MSH a été racheté en début d’année par XLPower (http://www.xlpower-rc.com/). Ils ont annoncé qu’ils allaient produire des pièces détachées pour les hélicoptères MSH. Ils vont également sortir un nouveau Protos 380 avec un design revu pour faire baisser les coûts. Ils ont prévu de mettre le servo d’anticouple sur le tube de queue (comme sur le Mini Protos) et de mettre des supports de poutre de queue (comme sur la plupart des hélicoptères RC). A suivre…
MSH Electronics (https://www.msh-electronics.com/) est une entreprise complètement séparée qui continue de produire le Brain 2.
Pour configurer l’ESC Hobbywing, il faut un boitier de programmation : https://www.hobbywingdirect.com/products/lcd-program
Les p’les du rotor d’anti-couple sont fournies dans le kit. Pour les pâles principales, il faut des p’les de 380mm (+/- quelques mm). Les Switchblades 383mm sont très bien. J’ai aussi des MS Composit que je trouve trop bruyantes (et donc probablement moins efficaces d’un point de vue aérodynamique).
A bientôt sur le terrain.
Hervé